


A Scenic Value Index for the Planets
Predicting the aesthetic quality of extraterrestrial landscapes

Every landing site on the Moon and Mars has been chosen based on scientific import and engineering safety. Many of these have had quite bleak scenery, like China’s Zhurong rover on Utopia Planitia:

And Apollo 11 in Mare Tranquillitatis:

By chance, others had much more character, like Gale crater:

And Taurus–Littrow Valley:

What if we wanted to choose these scenic landscapes on purpose? For a Moonbase, or a tourist expedition, or the first city on Mars. How would we do it?
Maps of other planetary bodies are everywhere: geologic maps, topographic maps, visible color maps, and so on. But to my knowledge nobody has ever created a map that tries to predict the visual charm of the terrain visible at each location, either for Earth or elsewhere.
Maybe this is a fool’s task: trying to reduce an intuitive but hard-to-describe sense of beauty and wonder into some code that rasters uncaringly over the surface, pixel by pixel. To counter though, how long would it take us to explore the entire surface of these bodies on foot or wheel and discover these spots on our own? Where will the first Starships land on Mars–thereby fixing all future development–if the only criteria are access to sunlight and subsurface ice?
To try to capture the quality of the views waiting for us, I combined two features I think are important. First, you should be able to see a lot from the location of interest. With no water or vegetation, the best landscapes on other planets are likely to be expansive. Standing at the bottom of a small crater, or on top of a smooth mountaintop will block the sight lines on all sides, giving a limited viewshed. We want the opposite of this. Second, what is visible should be interesting. On a flat plain you can see quite far in all directions but there’s often nothing to see, as in the examples above. We want a diversity of terrain features, like places on Earth with mountains viewed across valley floors, or with layers of rolling hills and lakes.
The resulting code is fairly simple: plop yourself down at each grid cell on a topographic map, spin around on the spot at some angular increment up to the human field of view, and record the sight lines based on angular heights (this depends on the body’s radius, and so incorporates planetary curvature). The Scenic Value Index combines the size of the largest viewshed at each location with the median absolute deviation of the heights of what is visible.
Here are the results for Mars:

Clear hotspots include much of Marineris, the flanks of many of the Tharsis and Elysium shield volcanoes, and large chunks of Argyre, among other local highs.
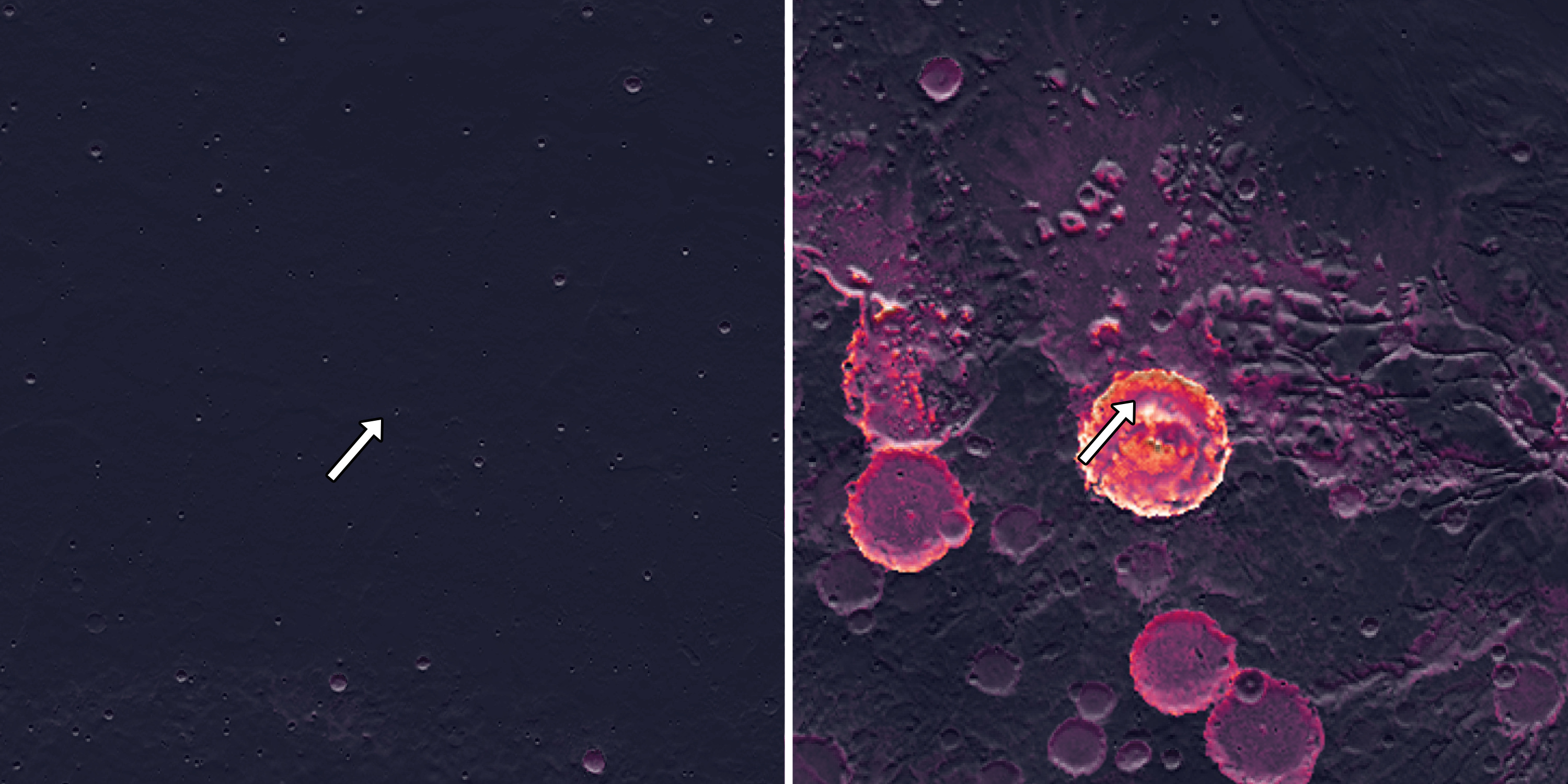
We can sense check using the examples above, here comparing the Zhurong and Curiosity sites, where the index map indeed predicts much better scenery for the latter:
The results for the Moon are simpler, given its crater-dominated geology:

Farside complex craters in the rugged lunar highlands are lit up the most, with particularly high values in Mendeleev, Zeeman, and Drygalski craters.
Because there’s so much interest in the lunar poles these days, I ran the south pole separately, where Malapert and Mouton command exceptional views:

You can argue this type of index shouldn’t trump science or mission safety when choosing future landing sites, but I’d push back. If you purged every scientific result from all the missions flown by NASA and just kept the photographs, the value of these missions would not change much if any in the eyes of the public. Taxpayers don’t care about the mineralogy of sulfate veins in Gale crater, or the Ar-Ar ages of lunar impact melts. Maybe with Jared Isaacman at the helm now, NASA should focus more on true exploration, with an eye for the difficult-to-reach, the never-before-explored, and the wonder the planets have to offer. And we damn sure better use this metric to guide the first permanent human footholds on these worlds.